W3cubDocs
/PointCloudLibraryFilter represents the base filter class. More...
#include <pcl/filters/filter.h>

Public Types | |
| using | Ptr = shared_ptr< Filter< PointT > > |
| using | ConstPtr = shared_ptr< const Filter< PointT > > |
| using | PointCloud = pcl::PointCloud< PointT > |
| using | PointCloudPtr = typename PointCloud::Ptr |
| using | PointCloudConstPtr = typename PointCloud::ConstPtr |
 Public Types inherited from pcl::PCLBase< PointT > Public Types inherited from pcl::PCLBase< PointT >
| |
| using | PointCloud = pcl::PointCloud< PointT > |
| using | PointCloudPtr = typename PointCloud::Ptr |
| using | PointCloudConstPtr = typename PointCloud::ConstPtr |
| using | PointIndicesPtr = PointIndices::Ptr |
| using | PointIndicesConstPtr = PointIndices::ConstPtr |
Public Member Functions | |
| Filter (bool extract_removed_indices=false) | |
| Empty constructor. More... |
|
| IndicesConstPtr const | getRemovedIndices () const |
| Get the point indices being removed. More... |
|
| void | getRemovedIndices (PointIndices &pi) |
| Get the point indices being removed. More... |
|
| void | filter (PointCloud &output) |
| Calls the filtering method and returns the filtered dataset in output. More... |
|
|
Public Member Functions inherited from pcl::PCLBase< PointT >
| |
| PCLBase () | |
| Empty constructor. More... |
|
| PCLBase (const PCLBase &base) | |
| Copy constructor. More... |
|
| virtual | ~PCLBase ()=default |
| Destructor. More... |
|
| virtual void | setInputCloud (const PointCloudConstPtr &cloud) |
| Provide a pointer to the input dataset. More... |
|
| PointCloudConstPtr const | getInputCloud () const |
| Get a pointer to the input point cloud dataset. More... |
|
| virtual void | setIndices (const IndicesPtr &indices) |
| Provide a pointer to the vector of indices that represents the input data. More... |
|
| virtual void | setIndices (const IndicesConstPtr &indices) |
| Provide a pointer to the vector of indices that represents the input data. More... |
|
| virtual void | setIndices (const PointIndicesConstPtr &indices) |
| Provide a pointer to the vector of indices that represents the input data. More... |
|
| virtual void | setIndices (std::size_t row_start, std::size_t col_start, std::size_t nb_rows, std::size_t nb_cols) |
| Set the indices for the points laying within an interest region of the point cloud. More... |
|
| IndicesPtr | getIndices () |
| Get a pointer to the vector of indices used. More... |
|
| IndicesConstPtr const | getIndices () const |
| Get a pointer to the vector of indices used. More... |
|
| const PointT & | operator[] (std::size_t pos) const |
| Override PointCloud operator[] to shorten code. More... |
|
Protected Member Functions | |
| virtual void | applyFilter (PointCloud &output)=0 |
| Abstract filter method. More... |
|
| const std::string & | getClassName () const |
| Get a string representation of the name of this class. More... |
|
|
Protected Member Functions inherited from pcl::PCLBase< PointT >
| |
| bool | initCompute () |
| This method should get called before starting the actual computation. More... |
|
| bool | deinitCompute () |
| This method should get called after finishing the actual computation. More... |
|
Protected Attributes | |
| IndicesPtr | removed_indices_ |
| Indices of the points that are removed. More... |
|
| std::string | filter_name_ |
| The filter name. More... |
|
| bool | extract_removed_indices_ |
| Set to true if we want to return the indices of the removed points. More... |
|
|
Protected Attributes inherited from pcl::PCLBase< PointT >
| |
| PointCloudConstPtr | input_ |
| The input point cloud dataset. More... |
|
| IndicesPtr | indices_ |
| A pointer to the vector of point indices to use. More... |
|
| bool | use_indices_ |
| Set to true if point indices are used. More... |
|
| bool | fake_indices_ |
| If no set of indices are given, we construct a set of fake indices that mimic the input PointCloud. More... |
|
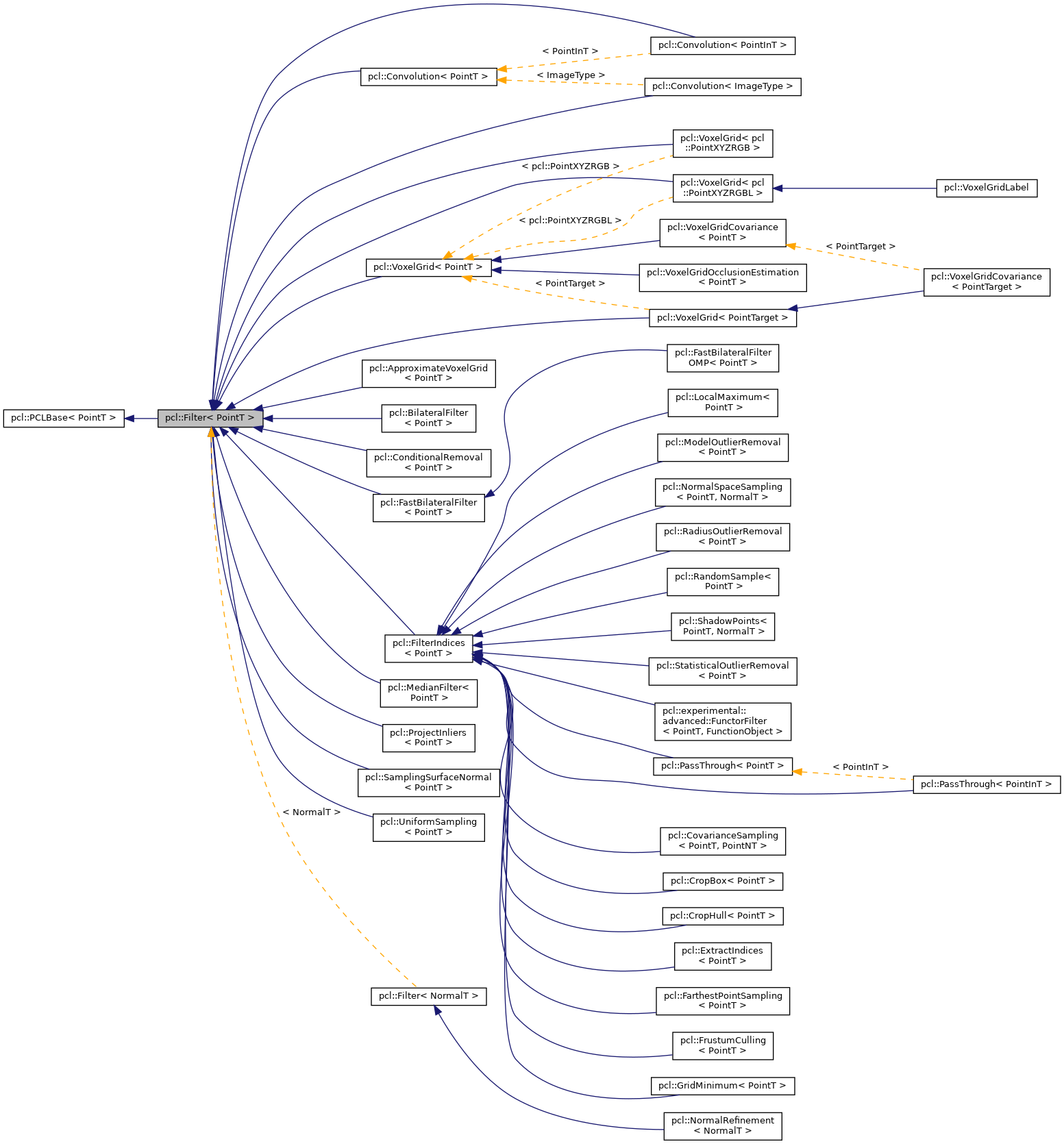
Detailed Description
template<typename PointT>
class pcl::Filter< PointT >
Filter represents the base filter class.
All filters must inherit from this interface.
Member Typedef Documentation
ConstPtr
| using pcl::Filter< PointT >::ConstPtr = shared_ptr<const Filter<PointT> > |
PointCloud
| using pcl::Filter< PointT >::PointCloud = pcl::PointCloud<PointT> |
PointCloudConstPtr
| using pcl::Filter< PointT >::PointCloudConstPtr = typename PointCloud::ConstPtr |
PointCloudPtr
| using pcl::Filter< PointT >::PointCloudPtr = typename PointCloud::Ptr |
Ptr
| using pcl::Filter< PointT >::Ptr = shared_ptr<Filter<PointT> > |
Constructor & Destructor Documentation
Filter()
| inline |
Member Function Documentation
applyFilter()
| protectedpure virtual |
Abstract filter method.
The implementation needs to set output.{points, width, height, is_dense}.
- Parameters
-
[out] output the resultant filtered point cloud
Implemented in pcl::VoxelGridLabel, pcl::VoxelGridCovariance< PointT >, pcl::VoxelGridCovariance< PointTarget >, pcl::VoxelGrid< PointT >, pcl::VoxelGrid< pcl::PointXYZRGB >, pcl::VoxelGrid< PointTarget >, pcl::VoxelGrid< pcl::PointXYZRGBL >, pcl::ShadowPoints< PointT, NormalT >, pcl::SamplingSurfaceNormal< PointT >, pcl::ProjectInliers< PointT >, pcl::NormalRefinement< NormalT >, pcl::MedianFilter< PointT >, pcl::LocalMaximum< PointT >, pcl::GridMinimum< PointT >, pcl::FilterIndices< PointT >, pcl::FastBilateralFilterOMP< PointT >, pcl::FastBilateralFilter< PointT >, pcl::ExtractIndices< PointT >, pcl::ConditionalRemoval< PointT >, pcl::BilateralFilter< PointT >, pcl::ApproximateVoxelGrid< PointT >, and pcl::CovarianceSampling< PointT, PointNT >.
Referenced by pcl::Filter< PointT >::filter().
filter()
| inline |
Calls the filtering method and returns the filtered dataset in output.
- Parameters
-
[out] output the resultant filtered point cloud dataset
Definition at line 121 of file filter.h.
References pcl::Filter< PointT >::applyFilter(), pcl::copyPointCloud(), pcl::PCLBase< PointT >::deinitCompute(), pcl::PointCloud< PointT >::header, pcl::PCLBase< PointT >::initCompute(), pcl::PCLBase< PointT >::input_, pcl::PointCloud< PointT >::sensor_orientation_, and pcl::PointCloud< PointT >::sensor_origin_.
Referenced by pcl::LocalMaximum< PointT >::applyFilterIndices(), pcl::GRSDEstimation< PointInT, PointNT, PointOutT >::computeFeature(), pcl::CrfSegmentation< PointT >::createVoxelGrid(), pcl::SIFTKeypoint< PointInT, PointOutT >::detectKeypoints(), pcl::people::GroundBasedPeopleDetectionApp< PointT >::filter(), pcl::kinfuLS::WorldModel< PointT >::getExistingData(), pcl::HypothesisVerification< ModelT, SceneT >::setSceneCloud(), pcl::kinfuLS::WorldModel< PointT >::setSliceAsNans(), and pcl::ism::ImplicitShapeModelEstimation< FeatureSize, PointT, NormalT >::simplifyCloud().
getClassName()
| inlineprotected |
Get a string representation of the name of this class.
Definition at line 174 of file filter.h.
References pcl::Filter< PointT >::filter_name_.
Referenced by pcl::VoxelGridCovariance< PointT >::filter(), pcl::VoxelGridCovariance< PointT >::nearestKSearch(), pcl::VoxelGridCovariance< PointT >::radiusSearch(), and pcl::VoxelGridCovariance< PointT >::setMinPointPerVoxel().
getRemovedIndices() [1/2]
| inline |
Get the point indices being removed.
Definition at line 103 of file filter.h.
References pcl::Filter< PointT >::removed_indices_.
Referenced by pcl::kinfuLS::WorldModel< PointT >::setSliceAsNans().
getRemovedIndices() [2/2]
| inline |
Get the point indices being removed.
- Parameters
-
[out] pi the resultant point indices that have been removed
Definition at line 112 of file filter.h.
References pcl::PointIndices::indices, and pcl::Filter< PointT >::removed_indices_.
Member Data Documentation
extract_removed_indices_
| protected |
Set to true if we want to return the indices of the removed points.
Definition at line 161 of file filter.h.
Referenced by pcl::experimental::advanced::FunctorFilter< PointT, FunctionObject >::applyFilter().
filter_name_
| protected |
The filter name.
Definition at line 158 of file filter.h.
Referenced by pcl::ApproximateVoxelGrid< PointT >::ApproximateVoxelGrid(), pcl::ConditionalRemoval< PointT >::ConditionalRemoval(), pcl::CovarianceSampling< PointT, PointNT >::CovarianceSampling(), pcl::CropBox< PointT >::CropBox(), pcl::CropHull< PointT >::CropHull(), pcl::ExtractIndices< PointT >::ExtractIndices(), pcl::FarthestPointSampling< PointT >::FarthestPointSampling(), pcl::FrustumCulling< PointT >::FrustumCulling(), pcl::experimental::advanced::FunctorFilter< PointT, FunctionObject >::FunctorFilter(), pcl::Filter< PointT >::getClassName(), pcl::GridMinimum< PointT >::GridMinimum(), pcl::LocalMaximum< PointT >::LocalMaximum(), pcl::ModelOutlierRemoval< PointT >::ModelOutlierRemoval(), pcl::NormalSpaceSampling< PointT, NormalT >::NormalSpaceSampling(), pcl::PassThrough< PointT >::PassThrough(), pcl::ProjectInliers< PointT >::ProjectInliers(), pcl::RadiusOutlierRemoval< PointT >::RadiusOutlierRemoval(), pcl::RandomSample< PointT >::RandomSample(), pcl::SamplingSurfaceNormal< PointT >::SamplingSurfaceNormal(), pcl::ShadowPoints< PointT, NormalT >::ShadowPoints(), pcl::StatisticalOutlierRemoval< PointT >::StatisticalOutlierRemoval(), pcl::UniformSampling< PointT >::UniformSampling(), pcl::VoxelGrid< PointT >::VoxelGrid(), and pcl::VoxelGridCovariance< PointT >::VoxelGridCovariance().
removed_indices_
| protected |
Indices of the points that are removed.
Definition at line 155 of file filter.h.
Referenced by pcl::experimental::advanced::FunctorFilter< PointT, FunctionObject >::applyFilter(), and pcl::Filter< PointT >::getRemovedIndices().
The documentation for this class was generated from the following file:
- pcl/filters/filter.h
© 2009–2012, Willow Garage, Inc.
© 2012–, Open Perception, Inc.
Licensed under the BSD License.
https://pointclouds.org/documentation/classpcl_1_1_filter.html